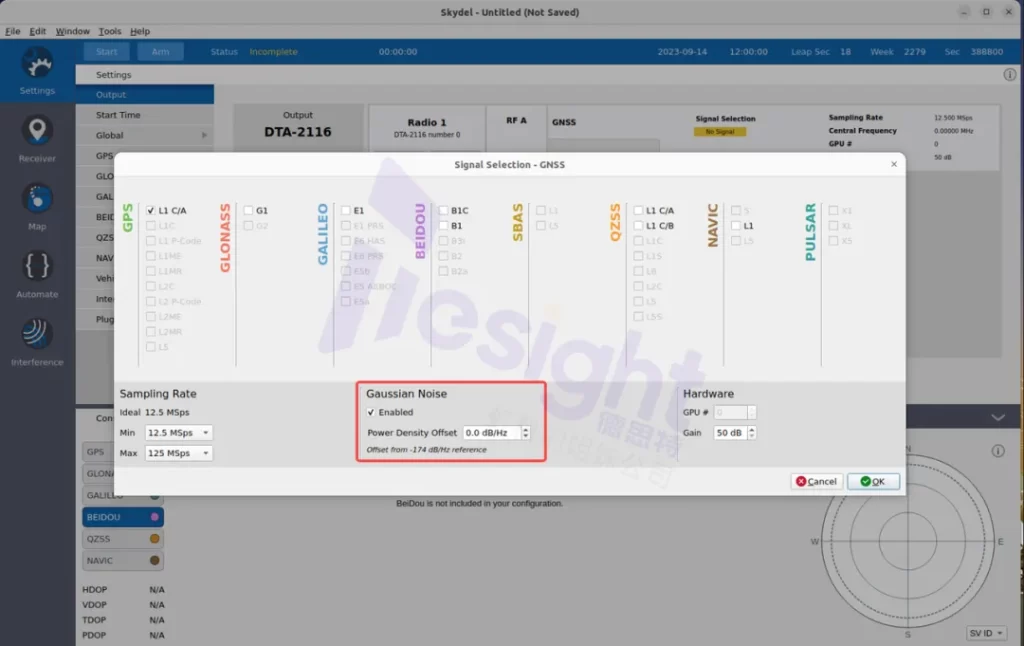
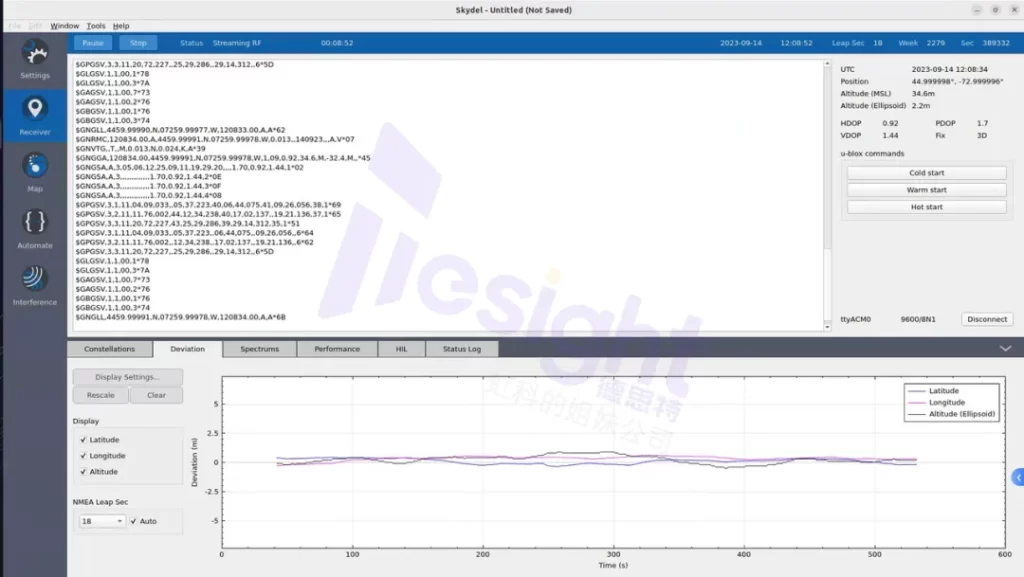
在德思特 GNSS 模拟器的设置界面,系统提供了关于“高斯噪声(Gaussian Noise)”的配置选项,允许用户在设置星座频点后,根据测试需求自由选择是否启用高斯噪声叠加功能。在全球导航卫星系统(GNSS)的射频仿真测试中,高斯白噪声(AWGN)通常被视为模拟真实电磁环境的基准配置。然而,工程实践表明,噪声的存在对接收机性能的影响并非线性的单调关系。
针对这一功能的具体应用场景及其对定位结果的影响,我们收到了一些用户的反馈与询问:“为什么开启噪声后定位反而更稳?”、“为什么弱信号下开启噪声会导致丢星?”
为此,我们撰写本文,旨在对高斯噪声在 GNSS 仿真中的深层作用逻辑进行深度解读。
一、高斯噪声在 GNSS 仿真中的物理定义与必要性
在理想的数学模型中,卫星信号是完美的调制于特定频率的BPSK序列;但在物理世界中,信号不可避免地叠加了热噪声。GNSS 模拟器引入高斯噪声,主要基于以下两个维度的必要性:
1. 物理环境的还原(The Physics): 卫星信号到达地面时功率极低(约 -130dBm),通常淹没在接收机前端的热噪声中。模拟器通过添加 AWGN,精确控制载噪比(C/N0)。这是连接“数字仿真”与“物理射频”的桥梁。
2. 接收机算法的“压力舱”(The Stress Test): GNSS 接收机的核心能力在于从噪声中提取信号。如果不添加噪声,测试的是接收机的“逻辑正确性”(代码是否有 bug);添加噪声后,测试的才是接收机的“信号处理性能”(灵敏度、跟踪精度、环路带宽设计)。

二、测试实例解析:两种特殊情况下高斯噪声对定位结果的影响
在实际测试中,噪声与定位效果之间存在复杂的非线性关系,主要体现在以下两个极端场景中。
(一)特殊情况1:无高斯噪声测试,定位效果反而更差
实测数据
1. 实测场景:我们选择了一个静态坐标,开启GPS L1CA进行仿真,分别添加/不添加高斯噪声进行10-15分钟的GNSS仿真,并连接GNSS接收机观测定位结果。
2. 测试结果:
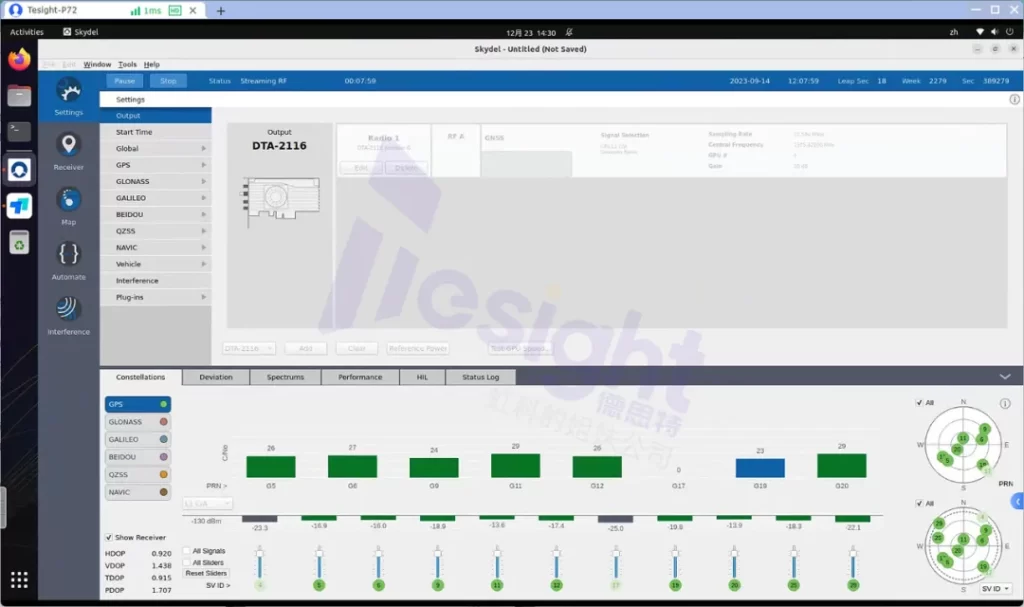
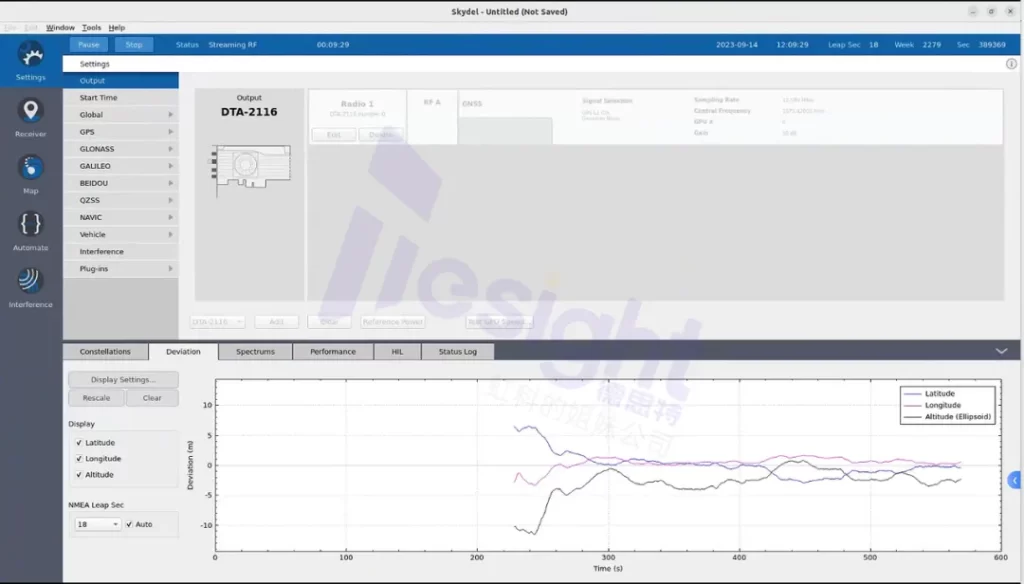
● GPS L1CA,添加加高斯噪声:观测到各卫星信噪比位于41-47dBc范围,定位结果较慢收敛且无跳变(140s),经纬高误差基本在1m,有些许抖动;
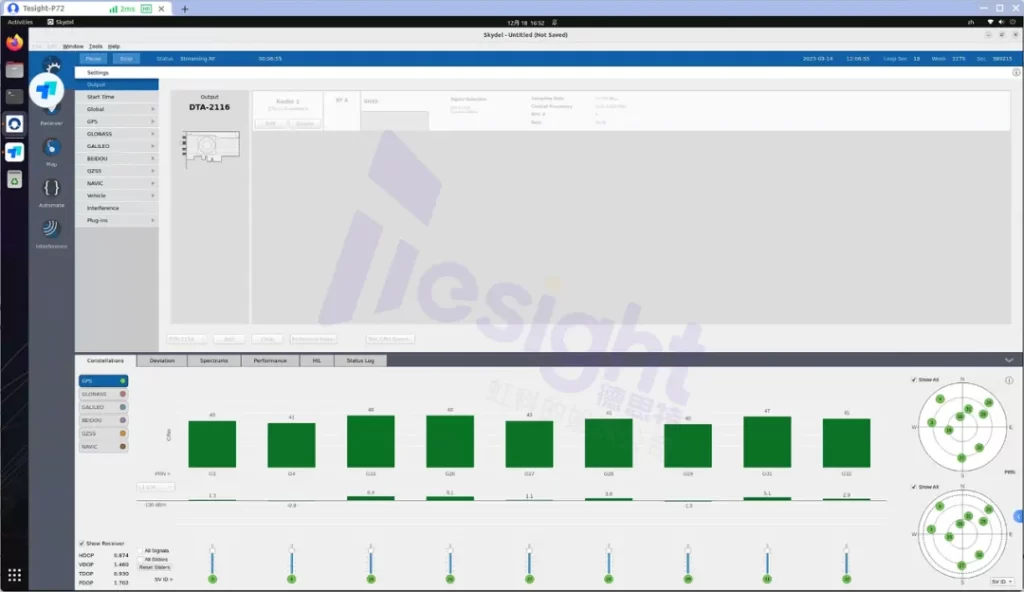
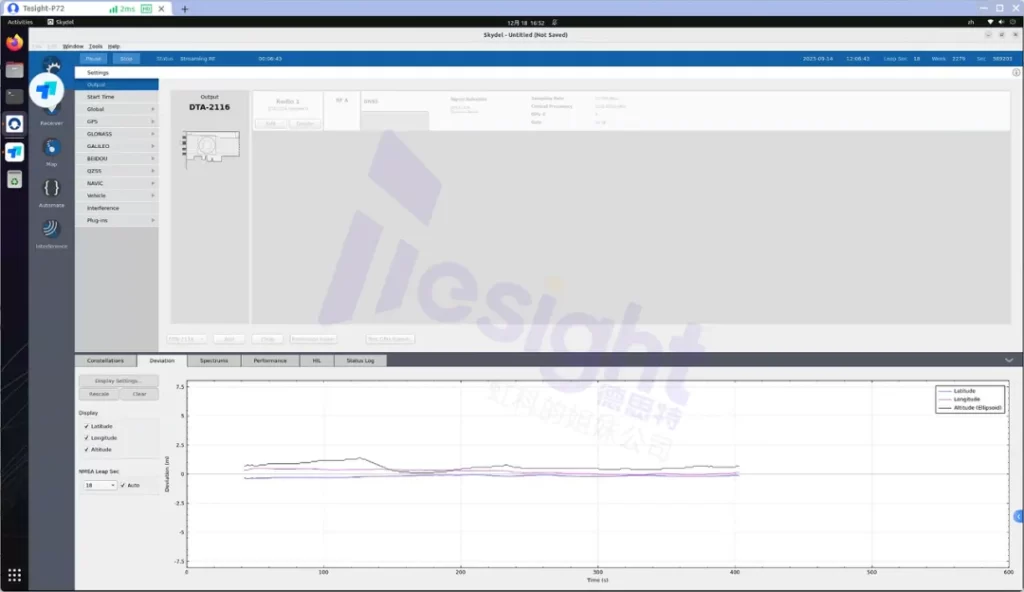
● GPS L1CA,不加高斯噪声:观测到各卫星信噪比位于45-51dBc范围,定位缓慢收敛且无跳变(500s),经纬误差基本在2m,高度误差10m,基本无抖动;
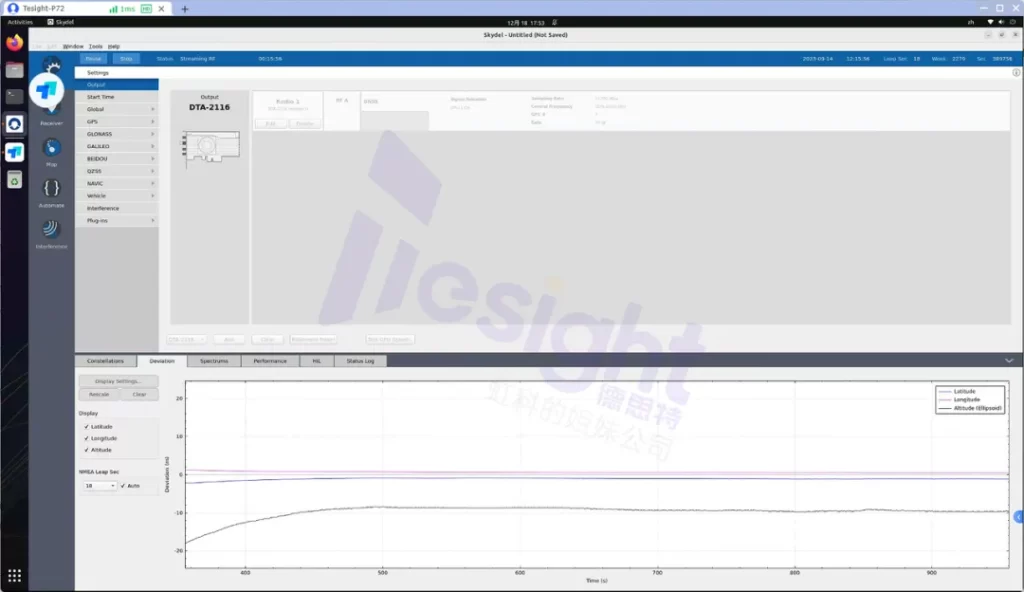
3.现象描述: 在标准信号功率下,关闭仿真器噪声,接收机信噪比更高,但定位表现为收敛极慢(500s)、存在明显的系统性偏差(尤其是高度向误差大,达到10m),但轨迹极度平滑,几乎无抖动。
原因分析
这一反直觉现象主要源于现代接收机算法对“随机性”的依赖:
1. 卡尔曼滤波器(KF)的“死锁”效应
● 原理:KF 依赖观测噪声协方差矩阵(R)与预测误差协方差矩阵(P)来计算卡尔曼增益(K)。
● 机制:当输入信号完全无噪时,观测值的残差(Innovation)极小甚至为零。这会导致滤波器认为系统已达到完美状态,从而过度减小增益,拒绝新的观测更新。结果是滤波器对初始误差或系统偏差(Bias)变得“迟钝”,导致收敛时间大幅延长。
2. 相关器的“死区”与量化误差
● 原理: 接收机鉴相器(Discriminator)在处理数字信号时存在量化精度限制。
● 机制: 适量的噪声在信号处理中起到抖动(Dithering)的作用,通过统计平均可以将分辨率提升至量化比特之下。若无噪声,微小的系统误差(如模拟器与接收机的时间同步微差)会落在鉴相器的“死区”内,无法被纠正,从而累积成固定的位置偏差(如观察到的10m高度误差)。
(二)特殊情况2:低功率环境下,添加噪声导致定位误差变大
实测数据
1.实测场景:我们选择了一个静态坐标,开启GPS L1CA进行仿真,在外部添加30dB衰减,使其输出功率降低至约-140dBm,分别添加/不添加高斯噪声进行10-15分钟的GNSS仿真,并连接GNSS接收机观测定位结果。
2.测试结果:
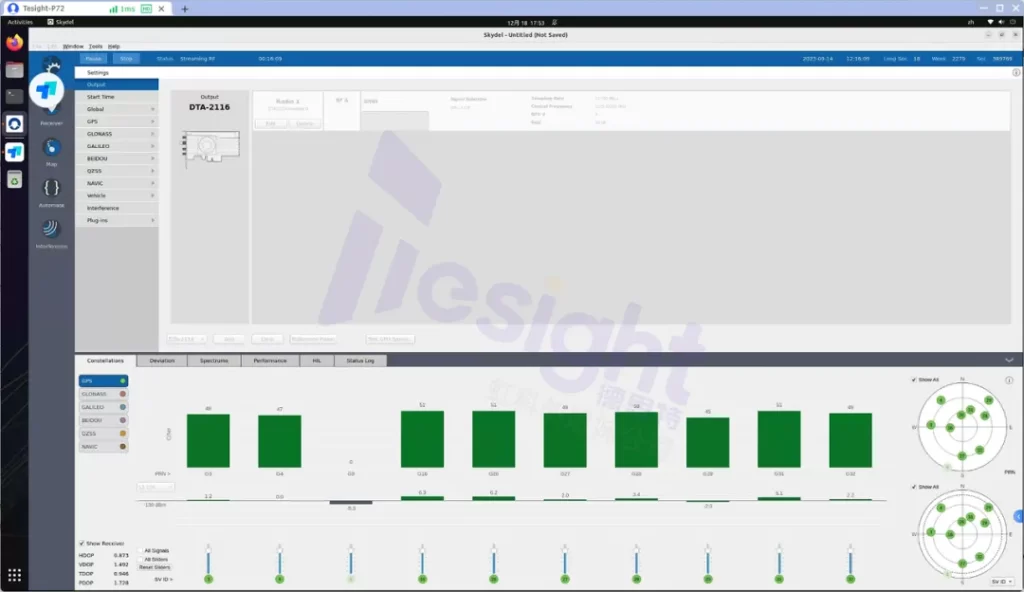
● GPS L1CA,添加加高斯噪声:观测到各卫星信噪比位于24-30dBc范围,定位缓慢收敛且无跳变(300s),经纬误差基本在3m,高度误差5m,且严重抖动;
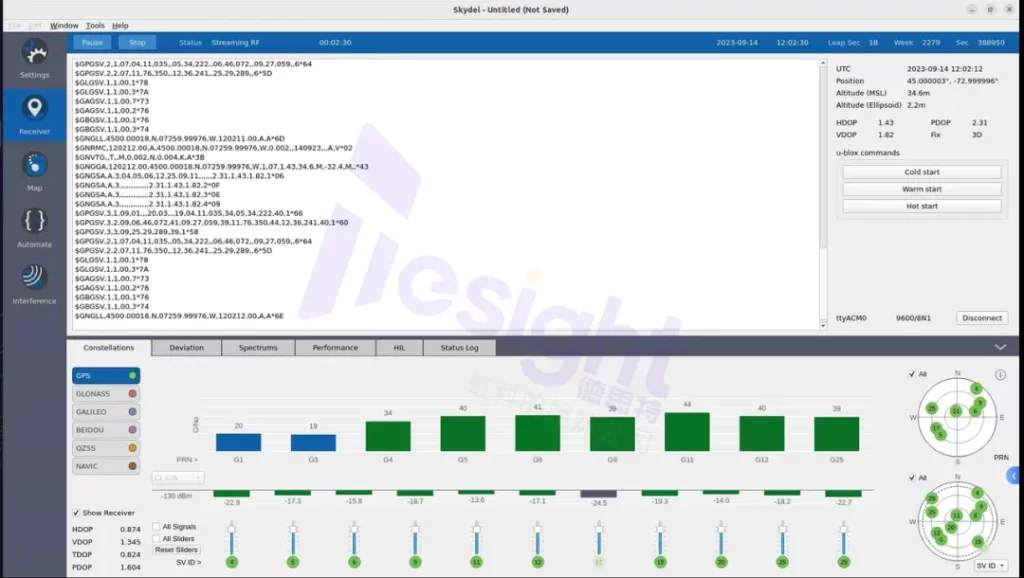
● GPS L1CA,不加高斯噪声:观测到各卫星信噪比位于34-44dBc范围,定位快速收敛且无跳变(40s),经纬高误差基本在1m,基本无抖动;
3. 现象描述: 当模拟室内或遮挡环境时,添加常规的高斯噪声反而会使信噪比降低,导致定位缓慢以及误差增大,若功率进一步降低,可能会导致导致接收机失锁、无法定位。
原因分析
此场景下,物理极限成为了主导因素:
1. 信噪比跌破香农极限与检测门限
若功率本来就较低,高斯噪声的添加导致信噪比过低,此时定位主导因素变成了信号强度,于是便出现了定位失准与缓慢的问题。当信号本身极弱,叠加的高斯噪声直接抬高了底噪水平(Noise Floor),导致 C/N0 瞬间跌破接收机的最小检测信噪比(Detection SNR),相关峰无法从噪声中凸显,则会出现定位失败问题。
2. 锁相环(PLL)的周期跳变
载波跟踪环路对相位噪声极其敏感。在低载噪比下,高斯噪声引起的相位抖动方差超过了鉴相器的线性牵引范围,导致频繁的周跳(Cycle Slips),使得高精度定位所需的载波相位观测值完全不可用。
(三)综合对比:噪声影响矩阵
为了直观展示上述分析,我们将不同工况整理如下表:

三、实践指南:如何科学设置仿真噪声
基于上述分析,在 GNSS 仿真中应遵循“分级测试”的原则:
1. 算法验证级(Logic Verification)
● 设置: 关闭高斯噪声。
● 目的: 仅用于检查代码逻辑、星历解算、坐标系转换是否正确。此时不关注定位精度,只关注“能不能解算出位置”。
2. 性能评估级(Performance Benchmark)
● 设置: 开启高斯噪声,校准C/N0 至标准值。推荐 C/N0=44dB-Hz,即Skydel界面中的-174dB/Hz
● 目的: 这是最接近真实露天环境的设置。以此状态下的 RMS、CEP、TTFF(首次定位时间)作为接收机性能的验收标准。
● 注意:在类似GB/T-45086.1这类标准化测试中,我们一般不开启高斯噪声,除非标准有特殊说明。因为此类测试一般通过射频电缆直连,排除了空间干扰。标准要求精确控制到达接收机天线口的信号功率是一致的。如果开启了模拟器的高斯噪声功能,由于噪声功率谱密度的叠加,接收机端口的总功率就会发生变化,从而干扰功率计或测试标准的准确性。
3. 极限压力级(Stress Testing)
● 设置: 保持噪声底噪不变,降低信号功率;或保持功率不变,增加噪声密度。
● 目的: 测试接收机的“断点”。绘制C/N0 与定位误差的曲线,找到接收机彻底失锁的临界值(Sensitivity Threshold)。
四、前瞻想法与建议
随着 GNSS 技术的发展,简单的“高斯白噪声”模拟已逐渐不能满足高端测试需求,未来的仿真与测试应关注:
从 AWGN 到“有色噪声”:真实环境中的噪声并不完全是白噪声,往往包含由多径效应或电磁干扰引起的“有色”成分。高级仿真应尝试引入相关噪声模型,测试卡尔曼滤波器的鲁棒性。
针对 AI 降噪算法的测试:随着深度学习被引入 GNSS 信号处理,接收机对非高斯噪声的处理能力变强。测试人员需要构建非典型分布的噪声库,以评估 AI 模型的泛化能力。

