一、Skydel中天线模型的作用
在Skydel中,天线模型允许用户进行单独设置,其中天线指代的是卫星发射天线与GNSS接收设备天线,一般仅对后者修改,天线模型会尽可能模拟现实中Vehicle的GNSS接收机天线接收信号的状态。Skydel的天线模型总的来讲有3种主要应用场景与作用。
1.射频性能与增益仿真(真实天线特性)
在实验室传导测试(非空口测试)中,通常使用射频线缆连接设备,这相当于将接收天线理想化为无增益、全向均匀的接收场,与现实环境存在显著差异。Skydel 允许用户自定义天线的增益模式(Gain Pattern)、相位中心偏差(PCV/PCO)以及极化特性。模拟信号在不同入射角度下的衰减与相位偏移,确保仿真结果符合真实天线的物理表现。
2.空间几何约束仿真(位置与姿态控制)
Skydel 支持对天线在载体坐标系下的精确空间定义,以还原物理部署对导航解算的影响。
-
- 天线位置(杠杆臂,Lever Arm)
用户可以设置天线相位中心与载体质心(或重心)的偏移量。这不仅能模拟解算位置的偏差,更是双天线/多天线定向系统仿真的核心。
- 天线位置(杠杆臂,Lever Arm)
-
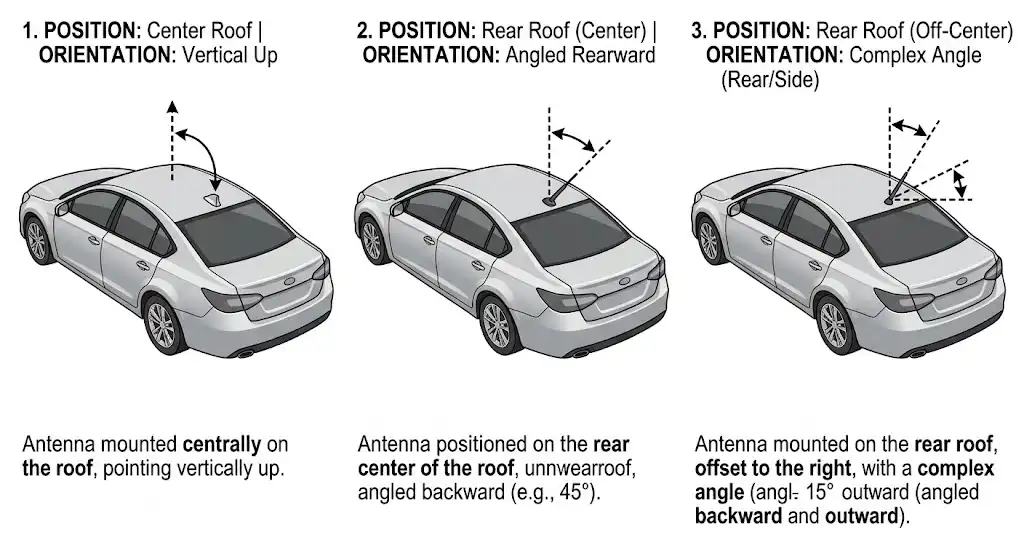
- 天线姿态(Orientation)
通过设置天线的仰角、方位角及翻滚角,确定增益模式的参考坐标系。这可用于仿真天线倾斜安装或载体剧烈运动时,因卫星相对角度改变导致的信号失锁或减弱。
- 天线姿态(Orientation)
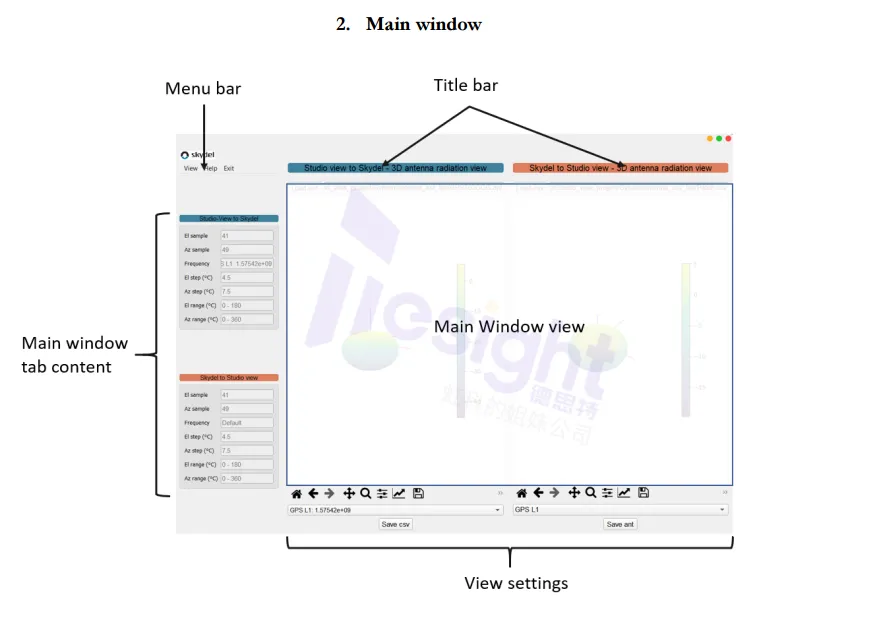
Skyde中使用平面方向图作为呈现方式,在这张图中(右图),横坐标表示方位角,纵坐标表示仰角。在某点颜色的深浅,代表该位置功率的增益大小。如图中标注的一点表示:仰角为21.1°,方位角为-45.7°的天空方向,该频段的信号增益为-2.81dB。详细设置办法可查看下一节。
仰角范围为-90°至90°,方位角范围为-180°至180°,其参考的坐标为天线的姿态,而天线的姿态随着Vehicle的轨迹移动发生变化。在默认情况下,Vehicle朝前的位置方位角为0°,地球水平面的仰角为0°。
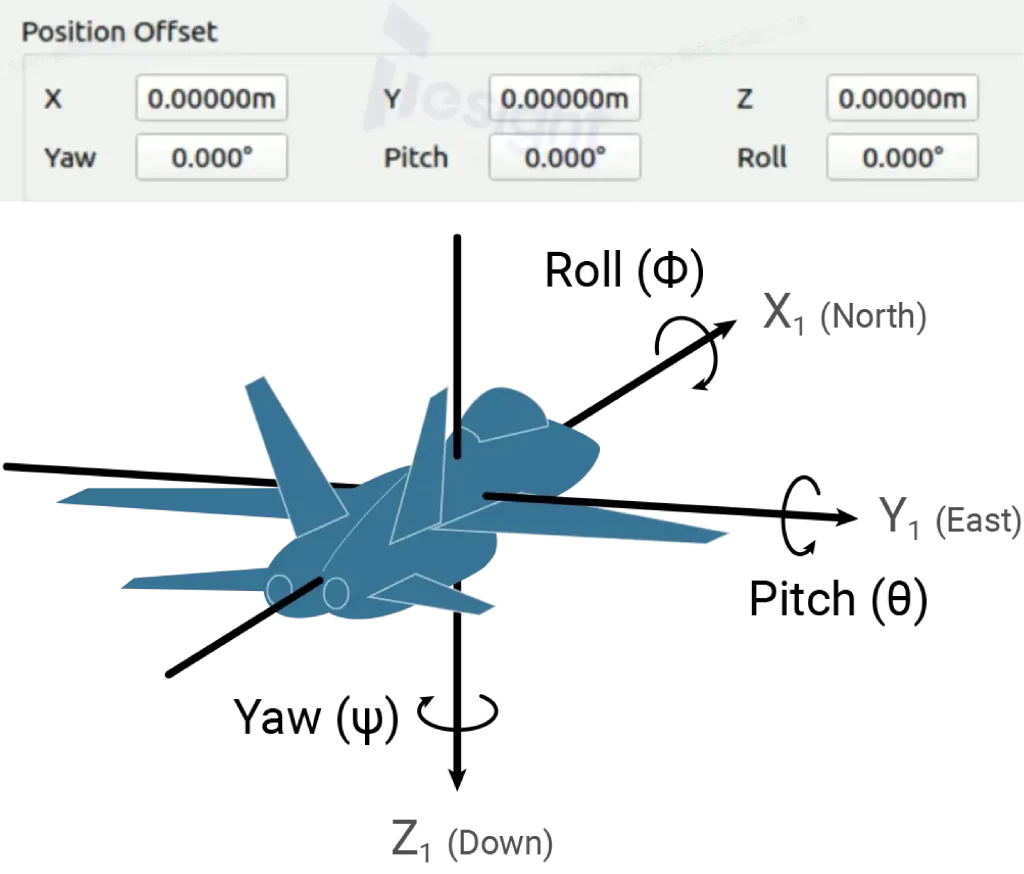
3.天线位置/姿态模型
天线的位置/姿态模型用于对天线相对于Vehicle的位置进行设置。默认情况下,X=Y=Z=0,roll=pitch=yaw=0。
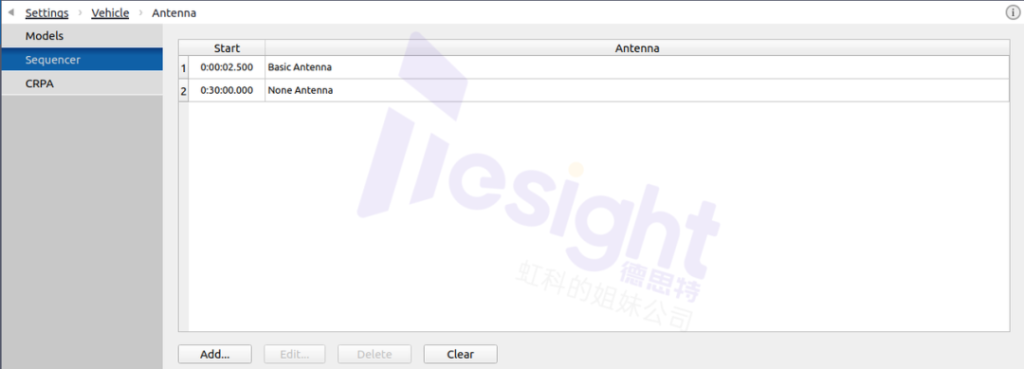
4.序列化模型切换
在仿真过程中,天线模型是不能改变的;但在仿真开始之前,可以通过序列化模型设置,提前给定在某个仿真时间点切换的天线模型,该模型切换次数与数量没有上限。如果在t=0时没有指定模型,系统将采用默认模型,直到模型切换。
二、天线模型的导入办法
1.CSV直接导入
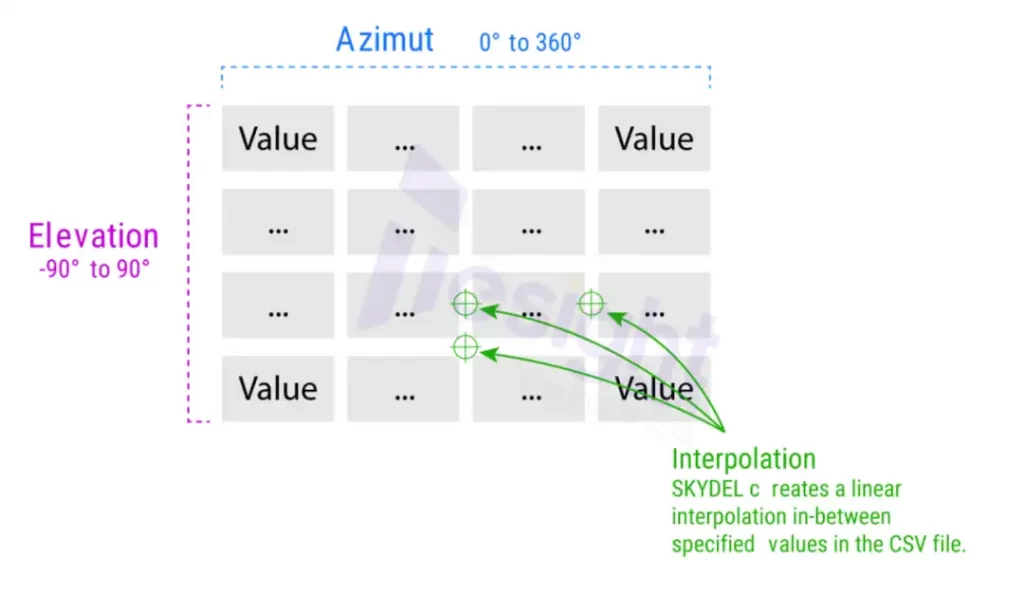
对天线模型仰角、方位角的设置需导入一个只含数值的csv文件,该文件的一行代表一个仰角度数,一列代表一个方位角度数。文件可以有若干行、若干列,Skydel将对行、列自动进行线性插值。文件的格式如下:
一个CSV文件定义一个天线增益模型,要点如下:
-
- 每一个CSV文件实际上是一个数值矩阵。Skydel将自动进行线性插值,创建连续的3D天线增益模型;
-
- 增益的单位是dB,角度的单位是°;
-
- 从上往下,第一行代表-90°仰角,末行代表90°仰角;从左往右,第一列代表0°方位角,未列代表360°方位角(即-180°方位角);
-
- 其余每一行都是仰角的均匀划分;
-
- 其余每一列都是方位角的均匀划分。
以一个简单的CSV文件为例,假设某个CSV文件的内容如下:

其含义是:
-
- 第一列代表方位角为0°的增益,第二列代表方位角为120°的增益,第三列代表方位角-120°(240°)的增益;
-
- 共有三行,仰角变化的步长为90°。第一行表示仰角为-90°的增益,第二行表示仰角为0°的增益,第三行表示仰角为90°的增益。
在系统默认的天线模型中,一共有181行、1列,即仰角步长为1°;方位角的增益没有变化。
2.ANT文件导入
此外,Skydel也支持使用配套的天线模式转换工具从.ant格式转换为csv格式并导入Skydel。
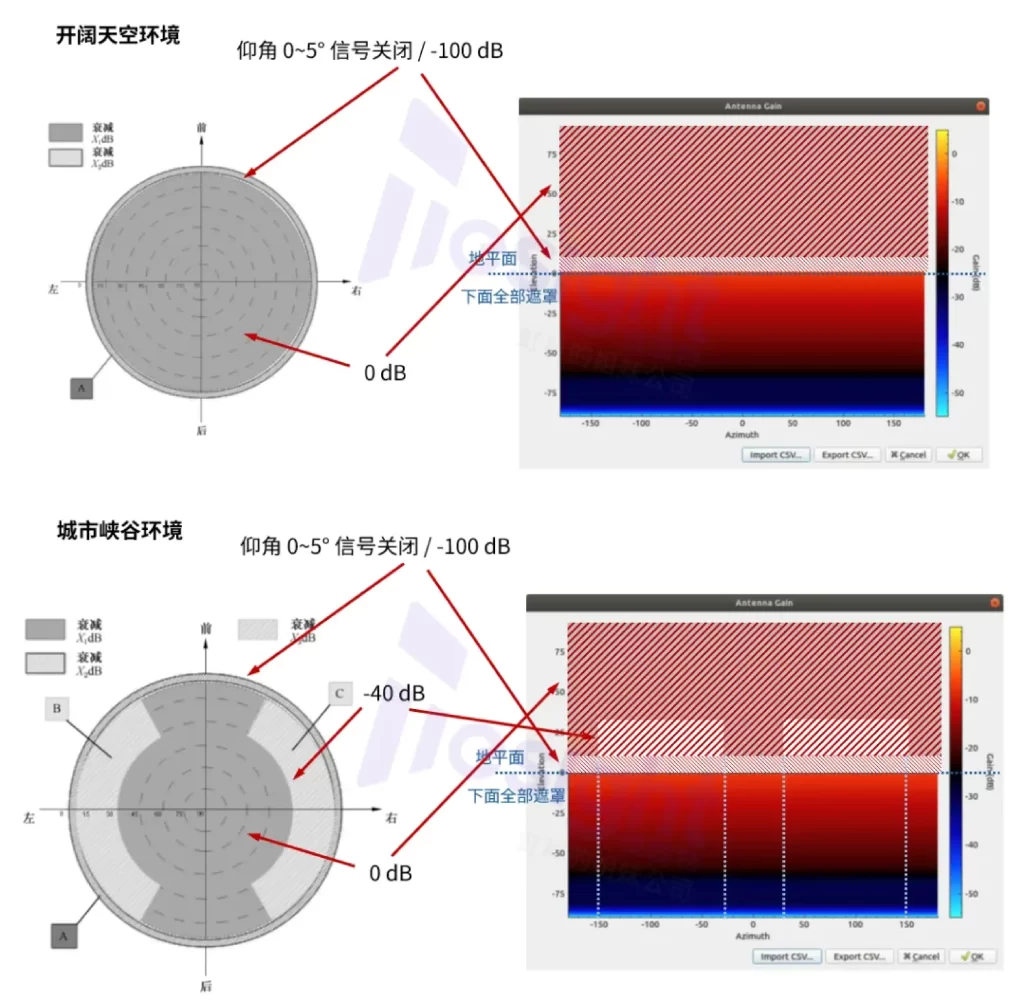
三、基于天线模型构建GB/T 45086的场景模型
GB/T 45086在附录D(规范性)车载卫星定位系统试验场景定义了两种测试需要的场景,并给出了方向增益图。
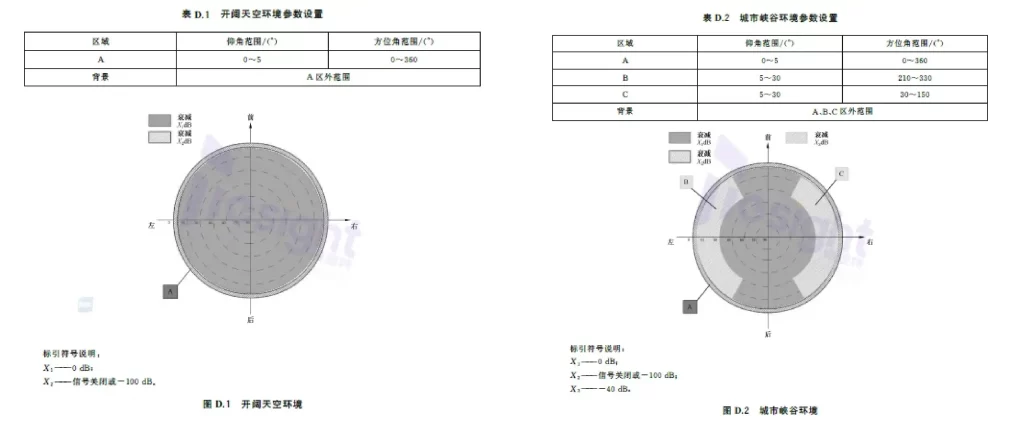
我们需要在进行相关场景设计时,借助python脚本将场景定义转换为CSV文件,并最终导入Skydel。该流程可快速生成 Skydel 原生支持的天线增益模型(如平面方向图所示)。借助此方法,测试人员无需手动构建复杂的传播与物理场景模型,并实现卫星场景与传播场景解耦,无需修改其他内容,即可在“开阔天空”与“城市峡谷”等典型场景间实现快速切换。