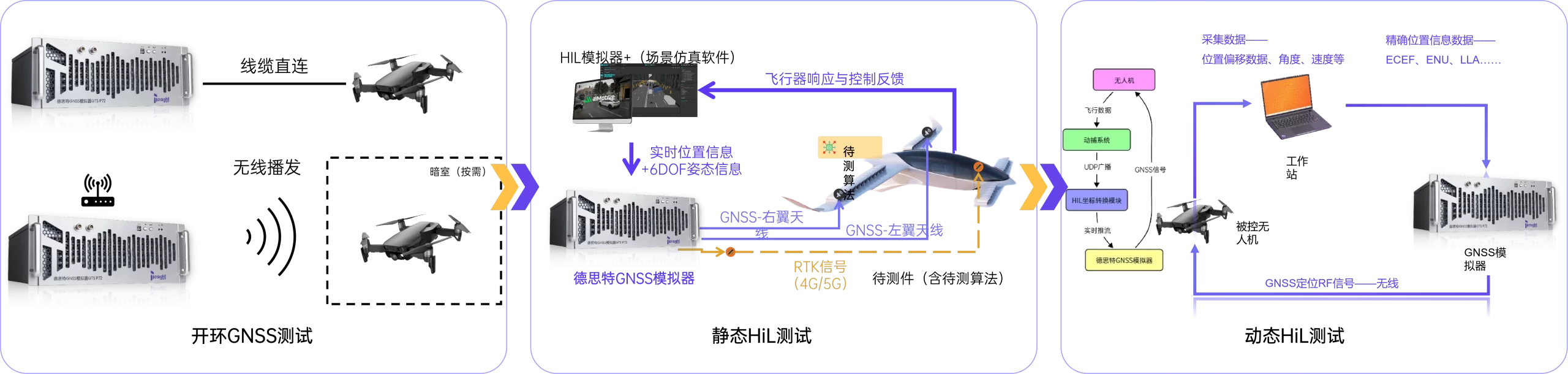
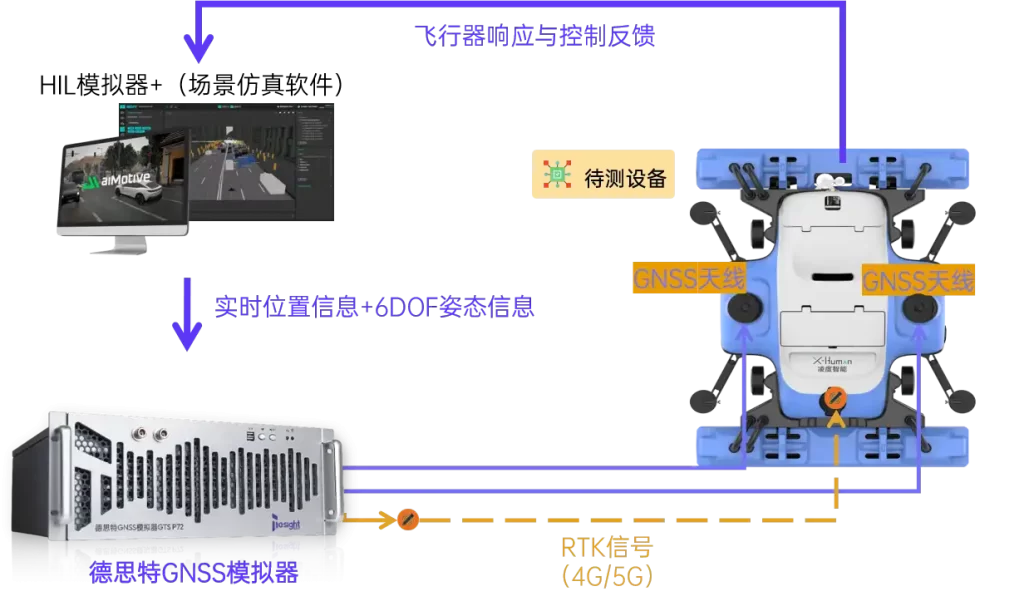
用于无人机&eVTOL的 GNSS测试解决方案 构建从导航验证到整机闭环验证的完整测试体系 低空经济的快速扩张重新定义了飞行器的研发标准。德思特基于高保真GNSS仿真技术与硬件在环(HIL)架构,提供了一套可在实验室中完成的完整测试体系——从GNSS模块验证,到飞控算法闭环,再到整机真实运动验证,覆盖无人机与eVTOL研发的全生命周期。 下载白皮书 申请试用 Industry Background 行业背景 低空经济的快速扩张,正在重新定义飞行器的研发标准。无人机与eVTOL不再只是会飞的机器,它们需要在复杂城市环境中自主导航、精准降落、应对干扰——这一切都高度依赖GNSS导航系统的可靠性。然而,传统的室外飞行测试已经难以支撑这一需求。飞行器的GNSS系统,早已超出”搜星定位”的范畴。今天的自主飞行平台,依靠GNSS参与路径规划、航迹跟踪、自动起降,并与IMU、视觉、激光雷达等传感器深度融合。一旦导航出现问题,飞控决策链条的每个环节都会受到影响。这意味着,GNSS测试的对象已经从一块接收机模块,扩展为整套飞行控制系统。验证的问题也从”能不能定位”,变成了”定位信息进入飞控之后,系统能否做出正确响应”。低空经济产业正在经历从单机飞行验证向系统级能力验证的关键转变。 Difficulties and Challenges 外场测试的困境与挑战 测试窗口短,进度难以保障 真实飞行测试高度依赖天气状况和飞行空域许可,卫星星座状态、大气条件也在持续变化。这些不可控因素导致研发进度频繁被外部环境打断。 成本与风险持续攀升 每次外场测试都意味着人员差旅、场地租赁和设备运输的投入。样机一旦失控坠毁,不仅损失设备,还可能造成人员伤害或引发安全事故。 问题难以定位,回归验证无从下手 真实环境中的多径效应、卫星遮挡和大气误差,在不同测试日之间不可能完全一致。一个偶发性的飞控异常,往往无法在下次测试中重现,根因分析因此陷入僵局。 极端场景几乎无法在真实环境中稳定构建 GNSS欺骗、强干扰、卫星信号异常、城市峡谷遮挡——这些对飞控系统最具考验的场景,在室外测试中要么难以重现,要么根本不被允许。 Solution Architecture 方案架构:三阶段测试体系 不同研发阶段对GNSS测试的需求截然不同。德思特将测试能力划分为三个递进阶段,团队可以根据当前研发目标选择切入点,并随研发深入逐步升级。 Phase 01 第一阶段:开环GNSS测试 这是最基础的验证层。GNSS模拟器生成高保真导航信号,待测接收机完成搜星、定位与解算,验证其在不同星座配置、信号强度和干扰条件下的表现。飞控系统如何响应不在这一阶段的考察范围内。 适用:模块厂商 / 产线测试 Phase 02 第二阶段:静态HIL测试 飞行器保持静止,但飞控系统处于真实工作状态。GNSS模拟器持续提供动态变化的导航信息,飞控根据定位结果产生控制决策,决策通过软件接口反馈至仿真平台,平台将结果传回模拟器更新信号输出——形成软件层面的完整闭环。 适用:算法开发 / 多传感器融合 Phase 03 第三阶段:动态HIL测试 飞行器产生真实的物理运动。动捕系统或激光跟踪系统实时采集位置、速度和姿态数据,通过UDP协议回传给GNSS模拟器,模拟器据此实时更新射频信号输出,飞控再根据更新后的信号调整控制指令——形成完整的物理闭环。 适用:整机性能验证 / 适航认证 研发阶段推荐方案典型验证内容GNSS模块 / 无人机下线产测开环测试定位精度、多星座兼容性、抗干扰能力飞控算法 / 自动起降静态HiL测试飞控逻辑、航迹规划、多传感器融合整机研发 / 适航前测试动态HiL测试飞行稳定性、整机控制性能、故障工况 Core Technical Capabilities 核心技术能力 高保真GNSS信号仿真 支持GPS、北斗、GLONASS、Galileo全主流星座,1000Hz更新率配合0.005m伪距精度,为厘米级RTK验证提供可靠信号基准,无需外部基准站即可完成RTK仿真。 实时闭环反馈 HIL内部延迟低于10ms,原生支持UDP数据接口,可与主流动捕系统直接联动。内置WGS84坐标转换引擎,将动捕系统的局部坐标实时映射至全球绝对位置,精度损失控制在厘米级。 干扰与异常场景仿真 支持GNSS欺骗、强干扰、多路径效应、卫星时钟异常、轨道异常等场景的精确仿真,帮助研发团队在实验室中提前验证系统在极端条件下的鲁棒性。 自动化测试 提供Python和C++开放接口,支持自定义测试场景的自动执行,并可对接GB/T 45086.1-2024等国家行业标准,为未来适航认证测试奠定基础。 Closed-Loop Architecture of the Solution 方案闭环结构 700卫星通道 1000Hz更新率 伪距精度0.005m HIL延迟<10ms Solutions and Case Studies 已完成验证的行业方案与案例 场景软件对接生态 动作捕捉系统对接生态 针对某无人机厂商的无人机下线自动化测试方案 针对消费级无人机制造企业量产质检需求,我们构建了一套高效、自动化的产线开环 HIL 测试平台。该平台聚焦于GNSS(全球导航卫星系统)相关性能的关键指标测试。该方案可显著提升质检效率、增强产品质量控制、降低测试成本、实现测试闭环、快速响应市场。 方案详情 针对整机系统级功能性能的静态闭环测试方案 德思特整机系统级静态闭环测试方案专为无人机与eVTOL研发量身定制。方案由HIL模拟器内嵌场景仿真软件,实时解算高频位置与6DOF姿态信息,并驱动德思特GNSS模拟器将高保真卫星信号及4G/5G RTK差分信号通过射频线缆注入待测设备的双天线中。待测整机飞控系统基于该信号做出控制决策,并将响应指令逆向回传至仿真平台,形成“软件驱动硬件、硬件反馈软件”的实时闭环。该方案在100%保证整机物理安全的前提下,可全天候高极限复现多传感器融合、航迹规划验证及极端干扰工况,大幅提升研发效率。 方案咨询 针对整机系统级功能性能的开环测试方案 德思特整机开环测试方案通过主控系统集中调度,由时间同步服务器确保全局高精度同步。GNSS模拟器输出高保真卫星信号直接注入待测飞行器,同时联动大型风洞设备模拟真实自然风扰。在无人机于实验室悬停飞行期间,系统整合凌云光、度量等尖端动捕设备,实时高精度采集飞行器的姿态与偏移数据并反馈。方案实现了“数字信号注入”与“外场物理环境模拟”的完美结合,是整机性能评估与适航前测试的核心利器。 方案咨询 Solution Value 客户价值 大幅降低研发成本与风险 引入实验室级GNSS测试体系,最直接的效果是减少外场飞行次数。场地租赁、差旅和设备运输的成本随之下降,样机坠毁风险也从研发流程中大幅剥离。 全天候100%极限场景覆盖 测试不再受天气和空域窗口限制,可以全天候持续进行。干扰、欺骗、卫星异常等真实环境中难以稳定复现的极端场景,在实验室里可以按需构建、反复执行。 显著缩短产品上市周期 在实验室阶段提前暴露问题,比在外场飞行中发现问题要快得多。问题可以精准复现、精确定位,迭代速度因此加快,产品从验证到上市的整体周期得以缩短。 联系德思特技术工程师 构建从导航验证到整机闭环验证的完整测试体系 联系工程师 152-9185-3139