随着 GNSS 仿真测试在车载、无人机及智能终端研发中的应用不断深化,HIL(硬件在环)仿真已成为验证定位性能的关键一环。
然而,在实际工程中,当 HIL 模拟器通过 UDP 向 Skydel 推送 PVT(Position, Velocity, Time)数据时,许多测试工程师会遭遇一系列“看似简单、排查却耗时”的问题——仿真坐标莫名偏移、速度异常超限、系统延迟过大、初始点对齐困难。
这些问题往往不是单个环节的故障,而是涉及坐标系转换、时间同步机制、数据协议设计等多个维度的交叉影响。传统的手动排查方式不仅效率低下,更容易因经验差异导致结论不一致。
本文整理了 HIL 调试过程中五类高频问题的原因分析与解决方案,全部来自一线测试场景的真实沉淀。
我们特别邀请到德思特研发工程师Liam和技术工程师Ian,围绕这些问题与背后的技术逻辑与实战经验,带来第一手的深度解读。
如果你正在经历类似的“卡点”,希望接下来的内容能帮你快速定位问题,找到正确的解决路径。
一、仿真坐标点与实际不匹配
Skydel-> Map右侧面板中显示经纬度(latitude、longitude)的值与HIL模拟器输出的经纬度的值不一致,导致仿真轨迹出现错误,怎么解决?
Liam:Skydel提供了一套API,只要按照固定的格式输入坐标数据,Skydel就有在该坐标位置进行仿真。出现位置异常,常见的原因如下,可逐一排查:
1、角度/弧度转换问题
在Skydel的HIL坐标推送接口中,接受的经度、纬度必须以弧度单位进行输入,如果是角度数据必须先进行转换。比如推送LLA(经纬高,lat, lon, alt)数据的接口,其中纬度和经度都是弧度制,以sim.pushlla接口为例:
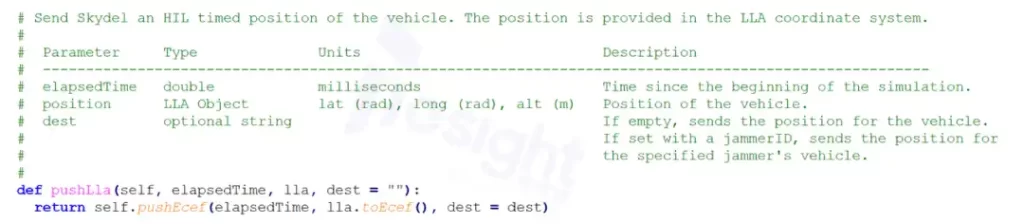
角度制转为弧度可以直接使用skydelsdx库中的toRadian函数来实现。
2、经纬度输入顺序问题
在构建Lla对象的时候,纬度在前,经度在后,否则会出现仿真坐标点错误。

当python脚本通过UDP获取到HIL模拟器的位置数据之后,构造Lla时需要注意经纬度的顺序问题,并且经纬度都应该是弧度。
3、坐标系转换问题
Skydel的HIL API接收的LLA数据点,必须基于WGS-84坐标系:

如果HIL模拟器中传输的坐标不匹配,需要先进行转换,否则可能导致仿真位置偏离数十米至数百米。
二、HIL系统的延迟过大
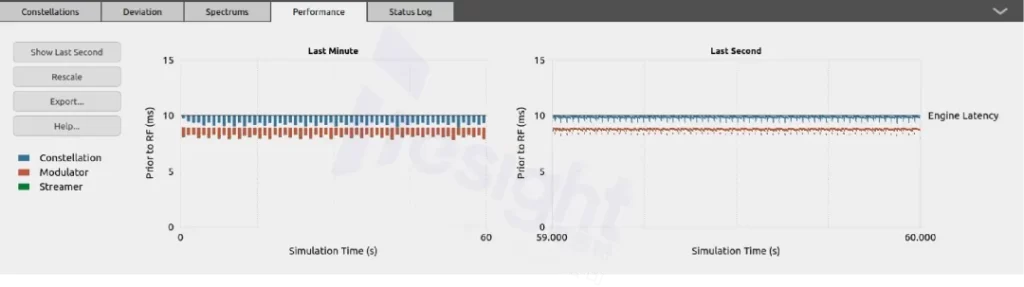
HIL仿真过程中,在Skydel软件下方的的”performance”一栏可以观察HIL延迟,出现延迟过大的情况怎么办?
Liam:关于延迟过大的问题,我们整理了三种可操作的解决路径,大家可以根据实际场景逐一排查:
- 调整时间同步策略:HIL 脚本中的 isOsTimeSyncWithPPS参数控制着操作系统时间与 PPS 信号的同步方式。如果当前设置为 True,可尝试改为 False;反之亦然。这一参数直接影响推流时刻的计算基准,切换后往往能有效缓解延迟。
- 优化推点节奏:适当提高轨迹推送点的频率,或降低 Tjoin 参数的值,可以缩短系统在每一步等待对齐的时间窗口,从时序上压缩延迟空间。
- 引入 NTP 统一时钟:对 HIL 模拟器与 Skydel 执行基于 NTP 的时间同步操作,确保两端在同一个时间基准上协同工作,减少因时钟漂移或不同步带来的延迟累积。
三、HIL 启动的时间对齐
如何在HIL仿真中实现不需要手动传入初始点就可以进入HIL仿真?
Ian:我们的处理逻辑是“先对齐,再启动,确保从第一个有效位置开始推流”。
在以往的测试中,如果 HIL 先启动再等待外部位置输入,容易出现初始时刻的时间轴错位,导致仿真从一开始就存在偏差。我们的做法是从机制上规避这个问题:
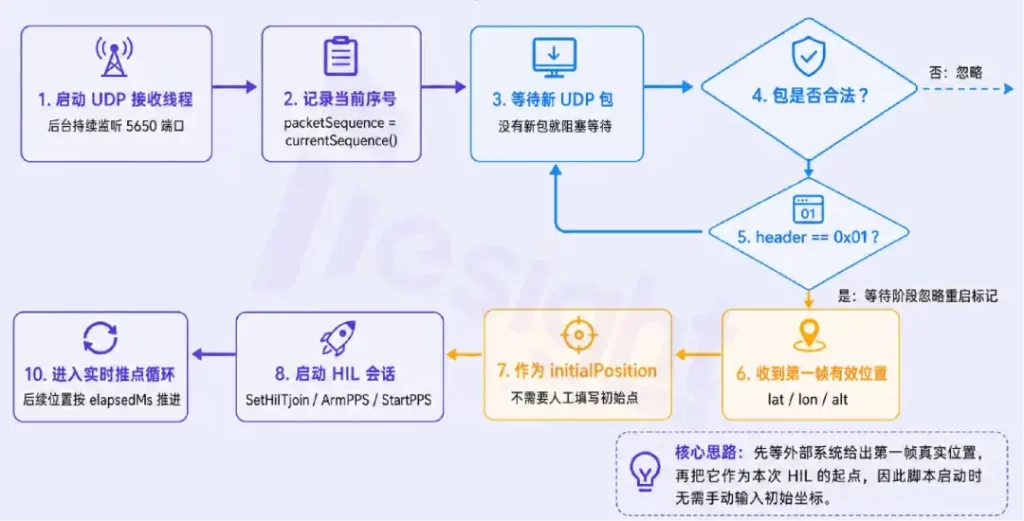
- 先接数:启动 UDP 接收线程,等待外部系统发来第一个有效位置包,在此之前不触发 HIL。
- 再对齐:以接收到的第一个有效位置作为本次仿真的 initialPosition,完成初始时刻的锚定。
- 后启动:在 elapsed=0 的时刻,从该初始点推入并启动 PPS/HIL,随后进入正常的推点循环。
这样一套流程下来,每一次 HIL 仿真都有明确、可追溯的起始基准,有效避免了因启动时序不当带来的初始偏差,让整个测试链路从第一步就保持可控、可信。
四、600m/s 限制下的轨迹循环
Skydel标准版允许仿真的最大速度是600m/s,可覆盖日常汽车、航空应用测试,但在一些非连续轨迹之间跳变时可能会超出此限制。如何在600m/s的限制下,实现非闭环轨迹在终点运行完快速跳变回初始点?
Ian:我们的思路是:不把它当成一次高速跳跃,而是设计成一次 HIL 重启事件。 这样就从机制上绕开了速度超限的问题,而不是去硬碰硬地突破限制。具体实现方式如下:
- 定义一套基于 UDP 的控制协议:UDP 包的第一个字段是 header,整体帧结构为 <BddfB>,即:header + lat + lon + alt + footer。其中,header == 1 被约定为重启标记(RESTART_HEADER = 1),本质上是通过 UDP 传入一个特殊的控制字节 0x01。
- 正常推点逻辑:脚本收到常规位置包时,正常执行 pushLla 推点,驱动 HIL 仿真持续运行。
- 重启触发逻辑:当脚本收到 header == 0x01 的包时,不会将其当作坐标数据,也不会推进位置,而是识别为“当前轨迹已结束,需要重启 HIL”。
- 主流程响应:当前 HIL 循环返回 True,主流程依次执行 sim.stop( ) → 重新配置仿真 → 重新等待初始位置 → 重新启动 HIL,完成一次完整的重启闭环。

五、仿真速度超出 600m/s
在正常汽车仿真中,提示仿真速度超出 600m/s,产生错误是为什么?
Liam:HIL 模拟器输出的轨迹本身很稳定,但 Skydel 中显示的速度却可能出现较大偏差,甚至超出 600m/s 的限制。通常可以从以下两个方向排查:
1、初始位置和后续轨迹不连续
HIL 仿真采用基于初始点的轨迹外推算法。脚本中需要先向 Skydel 推送第一个初始点,再进入 while 循环推送后续轨迹点。如果修改了 HIL 模拟器中的轨迹,这两处必须同步更新,否则初始点与后续轨迹之间会产生跳变,导致瞬时速度异常。
2、位置数据的高度值发生变化
Skydel 地图右侧面板显示的是三维速度,会叠加高度变化的影响。如果 HIL 模拟器推送的位置数据中,高度值因某种原因在传输过程中发生偏移或跳变,即使水平轨迹正常,三维速度也会出现明显的偏差,甚至触发超限。

