一、行业演进趋势
过去二十年,全球导航卫星系统(GNSS)已成为现代数字社会最核心的基础设施之一。然而,受限于多径效应、信号遮挡、电离层延迟及人为干扰欺骗,原生GNSS信号的定位精度与可靠性无法满足工业级高动态、复杂场景的需求。
在自动驾驶、无人系统与低空飞行领域,行业对于定位系统的要求已完成从“定位授时的基本需求”转向“高精度、高完整性、高连续性、高可用性、高安全性”,这推动了GNSS增强技术走向体系化,成为现代PNT架构中的核心组成部分。
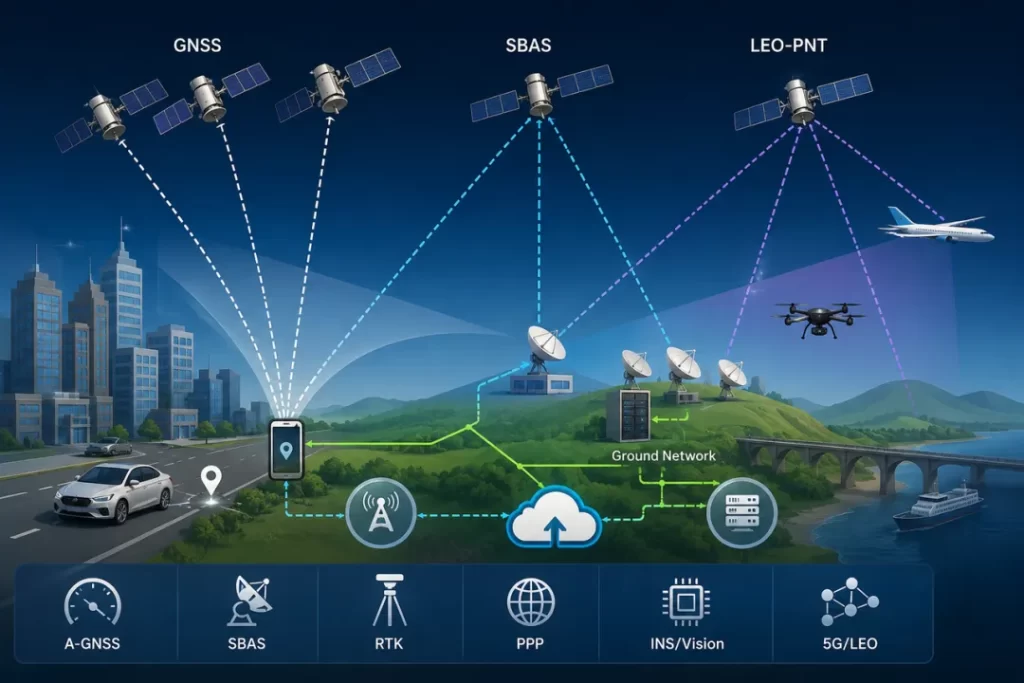
定位增强技术发展过程来看,从早期差分增强,到SBAS天基增强技术,再到当前的RTK、PPP、A-GNSS,以及如今正在快速发展建设的LEO-PNT,可以看到的是GNSS增强技术也在快速进步。
目前,全球导航增强技术已经形成了三大主流技术路线:天基增强系统(SBAS)、地基增强系统(GBAS/CORS)与辅助全球导航卫星系统(A-GNSS)。
二、核心原理
1.GNSS基本定位架构
标准GNSS定位采用空间几何距离交会法。卫星在已知时刻发送信号,终端接收机测量信号到达时间,通过光速乘以时间差计算伪距。其基本定位方程可表示为:

其中,(xi, yi, zi)为第i颗卫星的空间坐标,(x, y, z) 为待求的用户终端坐标,c为光速,dt为接收机钟差,εi为各项综合误差。
2.限制精度的三大核心误差源
要实现厘米级甚至毫米级定位,必须对以下三类误差进行精确消除或抑制:
- 卫星端误差:主要包括卫星钟差以及星历误差(轨道偏差)
- 传播路径误差:信号穿过大气层时产生的电离层延迟与对流层延迟
- 接收端与环境误差:多路径效应以及接收机内部热噪声
增强技术的核心是差分定位原理,即在坐标已知的基准点上布设接收机,反向求解出当前环境下的各项空间误差,然后将这些修正数据通过特定链路广播。终端接收机在计算定位时运行相同误差数据,从而实现定位精度的提升。
三、三大主流增强技术路线全景解析
1.天基增强系统(SBAS)
(1)技术定义
利用地球静止轨道(GEO)卫星向广域用户广播导航误差改正数和完好性信息的增强系统。
(2)主要应用
主要服务于民用航空和航海,提供大范围、高完好性的安全级导航。目前全球主流系统包括美国的WAAS、欧洲的EGNOS、日本的MSAS、印度的GAGAN以及中国的北斗天基增强系统(BDSBAS)。
(3)工作原理(地面测控+空间广播)
- 数据汇聚:分布式地面基准站(WRS)持续观测视线内GNSS卫星,并将原始观测数据实时汇集至中央处理中心(CPF)。
- 解算生成:CPF实时解算卫星星历误差、钟差改正数,并构建广域电离层延迟格网模型,生成标准SBAS电文。
- 射频广播:通过注入站发送至GEO卫星,GEO卫星以与标准GNSS信号相同的频段(如L1/L5)将改正数和完好性信息向全空域广播。
(4)现状与未来趋势
当前已完成民航一类精密进近(LPV)的应用认证。未来技术正全面向双频多星座(DFMC)SBAS升级。
1.地基增强系统(GBAS/CORS)
(1)技术定义
利用地面连续运行参考站(CORS)网络或地基广域增强网,通过无线通信或蜂窝网络提供高精度定位数据的系统。
(2)演进历程
从早期服务于机场局域的局域差分(GBAS/RTK),已演进至覆盖全国的网络RTK(NRTK),成功将定位精度由米级推进至厘米级、毫米级。
(3)核心技术机制
- 地面高密度布设的基准站网络实时采集载波相位观测值,并汇总至云端数据中心。
- 云端基于多基准站数据进行联合解算,构建包含对流层、电离层的时空误差插值模型。
- 用户终端通过移动网络上报大致位置(GGA语句),云端计算该位置的虚拟基准站(VRS)改正数并下发。
- 终端利用载波相位差分算法(RTK)实现厘米级快速收敛。
(4)现状与未来趋势
当前地基增强技术正处于产业爆发期,几乎已经成为了自动驾驶、无人机作业、测量测绘、精准农业的标配。
技术正从传统网络RTK向 PPP-RTK(精密单点定位与实时动态定位融合) 技术演进。PPP-RTK通过状态空间域(SSR)描述误差,无需终端频繁上报位置,具备极高的并发承载能力。未来将与5G/6G“通导一体化”技术深度融合。
3.辅助全球导航卫星系统(A-GNSS)
(1)技术定义
一种侧重于优化首次定位时间(TTFF,Time To First Fix)而非提升绝对精度的辅助技术。
(2)解决痛点
在城市峡谷、窗边等弱信号或冷启动状态下,传统接收机通过空中解调完整星历和历书需要30秒甚至数分钟。A-GNSS将该过程转移至地面网络层。
(3)加速机制
- 全球参考网络持续监控卫星状态,将最新的星历、历书、多普勒频移及时间信息实时存储于位置服务器。
- 终端触发定位需求时,通过蜂窝网络或无线网络向位置服务器发出辅助请求。
- 服务器结合终端当前的基站定位,定向下发该区域可见卫星的辅助数据。
- 终端无需高功耗的空中搜星下载过程,直接实现1~3秒内的锁星定位。
(4)现状与未来趋势
在智能手机、可穿戴设备以及海量低功耗IOT设备中,A-GNSS在降低TTFF的同时也降低了芯片的搜星功耗。
未来,A-GNSS会与网络RTK技术融合,通过高带宽的移动网络同时下发“星历与初始数据”与“高精度校准数据”,使用户享受到“快且准”的全新定位体验
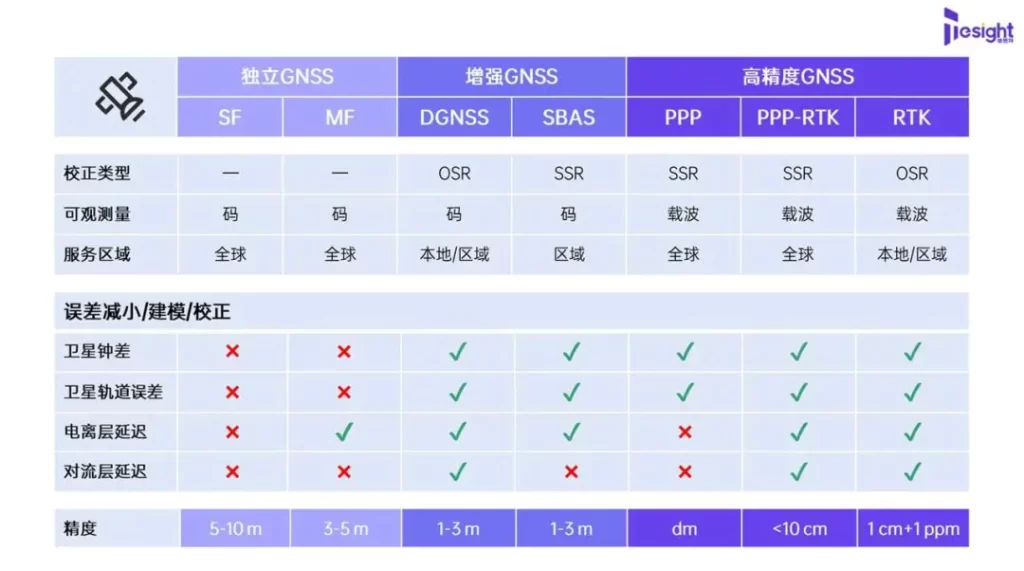
四、核心技术架构多维度对比矩阵

 前沿技术补充:
前沿技术补充:
INS组合导航系统:GNSS与惯性导航系统(IMU)紧/深耦合,利用惯导的自主推算能力,补偿隧道、地下车库等无卫星信号区域的定位连续性。
低轨卫星增强(LEO-PNT):利用几百公里的低轨道星座。因其信号强度高、几何运动快、抗干扰能力强,正在成为下一代高可靠增强技术的研究热点。
五、项目落地关键:GNSS模拟器在验证中的核心价值
随着增强技术的引入,现代导航定位演变为极其复杂的“星-地-网-端”协同生态。由于这些技术直接关乎无人驾驶、商用民航等生命安全领域,如何在终端产品上市前,对其增强算法完备性、多径抑制能力以及极限抗干扰状态进行全面评估,成为当前研发工程的核心挑战。在此背景下,GNSS模拟器展现出不可替代的测试与验证价值:
1.消除高昂的实地测试成本与环境不可控性
依赖真实天空(Live Sky)进行实地测试,面临极高的物力成本和时间周期。更重要的是,真实自然环境具备不可重现性,特定的大气层扰动、极端多径衰落等属于“可遇不可求”的偶发事件。
价值体现:GNSS模拟器通过数学建模与射频信号仿真,能够在实验室环境下100%重现全球任意时间、任意地点的仿真场景。同时支持定量添加电离层延迟、对流层折射、卫星轨道扰动及定制化多径状况,确保测试具备可重复性与确定性。
2.支撑多异构信号高精度算法的完备性验证
对于支持SBAS、PPP-RTK或A-GNSS的复杂接收机终端,需要同时接收并处理空间射频信号与地面网络电文两路或多路异构数据。
价值体现:高精度GNSS模拟器可与基站模拟器进行微秒级硬同步协同测试,精确控制射频信号发射时刻与基站网络电文下发的时延。同时,支持在仿真中人为注入非健康星历字、突发时钟故障或太阳电磁风暴等异常,允许研发人员进行全面的完备性(RAIM)与边缘场景(Corner Cases)测试。
3.高危动态场景的安全性验证与极限能力评估
在真实世界中,验证民航客机大坡度盘旋时的信号锁定、或者自动驾驶车辆遭遇恶意伪造欺骗/压制干扰等极限场景,进行实地测试的危险系数极高且难以定量。
价值体现:GNSS模拟器支持导入高动态、高阶次的轨迹文件(如高烈度机动、车辆颠簸等),并可同步产生定量、定姿、定时的干扰射频信号,是评估安全级终端抗干扰与防欺骗能力最高效、安全的测试手段。

